Perception-based haptic
compression techniques
Since realistic haptic
environments require significant data transfer, compression techniques
play a significant role in transmission of multi-media information.
Researchers have investigated efficient lossy compression techniques
for image compression (jpeg) to facilitate the storage and transmission
of images. Most lossy visual compression techniques rely on the lack of
sensitivity in humans to pick up detailed information in certain
scenarios. Similarly, limitations in the sensitivity of human touch
could be exploited to create haptic models with the minimum amount of
haptic data necessary to reproduce the correct feel to the user under a
given set of conditions. These compression
techniques
store the haptic data only when the force exceeds a certain threshold
of the force
perception.
In this research, the
absolute force thresholds (AFT) of the human haptic system are detected
for three different
ranges
of velocity of the user's hand motion through psychophysical
experiments. The
AFT is the smallest amount of force necessary to produce a sensation.
The
detected AFTs can be used in a psychophysically motivated lossy haptic
(force)
compression technique in cases where the human user or the object is in
relative motion. This study implies that, when a user's hand is in
motion,
fewer haptic details are required to be stored, calculated or
transmitted.
Adaptation
of kinesthetic sense to forces in a virtual environment
(VE)
Realistic haptic
rendering is one of the most challenging issues in the field of virtual
reality. The kinesthetic sense of the
human haptic system is mostly used to feel a virtual surface using
haptic devices. Of course the intent is for the user to experience the
same sensations in the virtual realm as they would in the real world.
Therefore, we need to know the capabilities of the human haptic system.
With this in mind, limitations in the sensitivity of human kinesthetic
sense could be exploited to create haptic models with much less detail.
For example, a compression technique stores the haptic data only when
the force exceeds a certain threshold of the force perception. If the
threshold is higher, the haptic data can be more efficiently
compressed. The force threshold increases when the sensory system
adapts to forces.
In this study, the
existence of adaptation to force feedbacks in a virtual environment
(VE) is invesigated. Psychophysical experiments are conducted to study
how adaptation is influenced by changes in the force intensity and
direction. The results indicate that the users definitely adapt to
forces in a VE. However, the force direction and force
increment/decrement do not affect adaptation. This
limitation can be incorporated in the haptic compression technique when
users
are in touch with the haptic device for an extended period of time. If the force threshold is higher due to
adaptation, the haptic data can be more efficiently compressed.
Factors
affecting the just
noticeable difference (JND) of force perception
The capabilities of the
human haptic system play an important role in designing haptic
displays. Thus, quantitative human studies are required to ascertain
the impact of human factors on the design of haptic devices. The focus
of this study is on the quantitative measures of human force thresholds
that affect the design specifications of force feedback haptic
interfaces. Most researchers in this field have measured the Just
Noticeable Difference (JND) of the human haptic system with the user in
static interaction with a stationary rigid object. However, we are
interested in detecting the limitations of the haptic perception in the
haptic rendering of virtual environments
where the user's hand is in motion.
Our study focuses on the determination of force thresholds in a virtual
environment using a PHANToM haptic device, instead of dealing with real
textured surfaces via a real probe.
First, two experiments are conducted to study the potential
effects of the
direction
of force application on the force JNDs with respect to changes in the
increment/decrement
of forces. The results indicate that the force JNDs depend on the force
direction and the force increment/decrement, and these two variables
must be
incorporated in the design of haptic displays.
Second, four experiments are conducted to measure the JND of the
human haptic system using methodologies from psychophysics. The effects
of three factors on the force JND are also studied, including the base
force intensity, the user's hand velocity, and the force
increment/decrement. The experiments are conducted for two different
ranges of base force intensity, the velocity of the user's hand motion
and the force increment/decrement. This study shows that, when a user's
hand is moving, not only the force JND of the human haptic system
depends on the force increment/decrement, the JND also depends on the
user's hand velocity. The results also indicate that the base force
intensity has a major effect on the force threshold of the human haptic
system. Measured
human factors such as the just noticeable difference (JND) of force
perception that
affect the design specifications of force feedback haptic interfaces
when the
human user or the object is in relative motion.
Studying the
effect of
sub-threshold forces on human performance in VEs
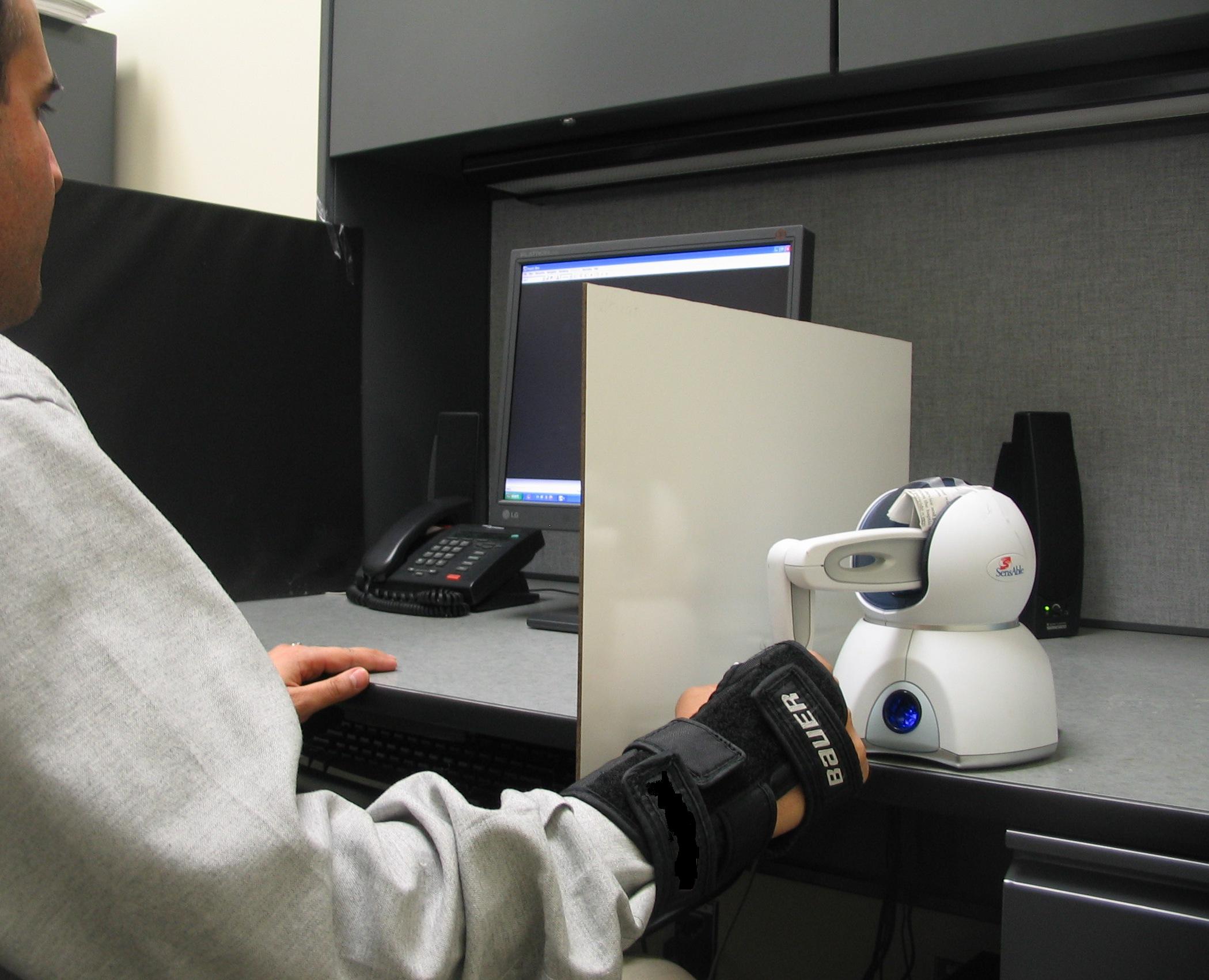
In virtual reality
applications, a user usually grasps an input device to explore inside
of a virtual environment. A virtual probe or a tool tip usually
represents the user's hand in the virtual environment. The user can see
the tool tip through a computer or a head-mounted display. Thus, users
can only maintain their movement and accuracy using visual cues.
However, in a haptic-enabled virtual environment, users can explore and
manipulate virtual objects using the sense of touch. Haptic-enabled
virtual environments are widely used in a variety of applications such
as computer-aided design (CAD), computer-aided assembly,
computer-assisted surgery and so on. In most of these applications,
human performance efficiency in virtual environments is critical to
carry out a task.
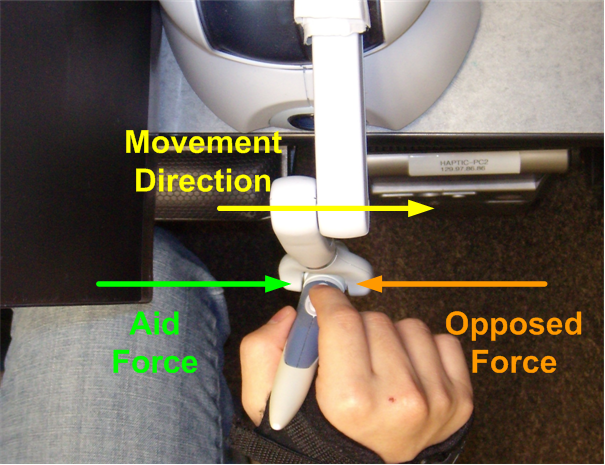
The main goal of this
research is to study the effect of sub-threshold forces on human
performance in a haptic-enabled virtual reality system. A multi-modal
task similar to Fitts is used to study the effects of the sub-threshold
forces on user performance. Each user's movement is manipulated using
controlled forces such that the user is not aware of the forces.
Subjects can see the position of the haptic probe in a virtual
environment where they are manipulated using sub-threshold forces. The
multi-modal task is used to measure the accuracy of subjects in two
experiments. During the experiments, the effects of force intensity and
the relative direction of applied forces to the direction of user's
hand motion in the presence of visual cues are investigated. A
performance index is also introduced that can be used to evaluate human
performance in the application of sub-threshold forces. A
psychophysical method is utilized to ensure that the applied forces on
the user's hand are below the force threshold of the human haptic
system. Results indicate that user performance is affected by both the
intensity and direction of sub-threshold forces even when the users
could control their actions through visual feedbacks. The results can
be incorporated in an active manipulation technique to maintain the
accuracy of
user's movement in a haptic-enabled environment
without the user being aware of the forces.
Modelling haptic
devices using a
rule-based
expert system
A methodology is
proposed that generates a model which employs qualitative
reasoning to encapsulate
nonlinear effects that are often approximated as linear processes. Fuzzy set theory is utilized to implement rule-based expert
systems based on
constant parameters
from a) experimental data and b) expert knowledge.
The
parameters are tuned for multiple operating regions to model the
nonlinear
damping
behaviour of the PHANToM haptic device.
Haptic Display of Deformable Objects
·
Developed and
simulated a nonlinear model for PHANToMTM
device using the MATLABTM,
Simulink and Maple, including kinematics and
dynamics of the
device
·
Obtained
an experimental linear model of the haptic device by utilizing
model-based
system identification techniques
·
Estimated
and validated the device friction (damping) factors by comparing
experimental
and model data
·
Obtained
a model of the system with (a) the known friction parameters, (b) the
combined
nonlinear kinematics and force/torque transformations and (c) the
nonlinear
device model
·
Linearized
the nonlinear model for the purpose of control design and utilized two
different position/force feedback linear control strategies
· Investigated the robustness and performance of the control strategies for different modeling configurations with respect to the changes in the applied force and stiffness of a deformable object