Dr.
Kevin G. TeBeest
Assoc. Prof. of Applied Mathematics
Kettering University
Example 5: Forced Motion with Transient and Steady State Terms
| > | de := 2*diff(x(t),t$2) + 24*diff(x(t),t) + 272*x(t) = 1200*sin(8*t); |
| (1) |
Solve the above ODE, subject to initial conditions x(0) = 4 and x'(0) = 36 . Store the result in X:
| > | X := rhs( dsolve( {de, x(0) = 4, D(x)(0) = 36 }, x(t) ) ); |
| (2) |
Simplify the solution, and store the result in X:
| > | X := combine( X, trig ); |
| (3) |
| > | xp := -4*cos(8*t) + 3*sin(8*t); |
| (4) |
Plot the solution:
| > | plot( [ xp, X ], t = 0 .. 2, thickness = [10, 5], color = [red, blue], title = `Ex 5: Forced Motion`, ytickmarks = 5, thickness = 5, titlefont = [HELVETICA, BOLD, 16], legend = ["Partic. Soln xp(t) ", "Solution x(t)"], legendstyle = [ font = [HELVETICA,BOLD,14] ], size = [560,400] ); |
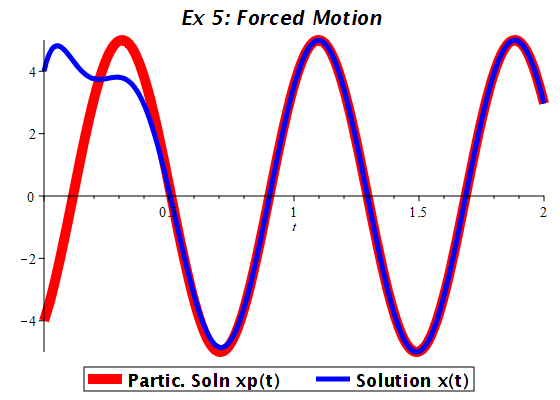 |
The complementary solution
xc(t)
represents decaying
oscillation while the particular solution
xp(t)
is simple harmonic. In this
case we say the complementary solution is transient and the
particular solution is steady.
So after a sufficient amount of time has passed (about 1/2 second in this example),
the motion has reached steady state, and we may
approximate the equation of motion
x(t)
by the particular solution.